
Electrohydraulic drives are still largely connected via analog interfaces and centralized closed control loops, but strides are being made to develop future-looking technologies that integrate easily into IoT and Industry 4.0 requirements.
Contributed by: Benno Birke, Senior Vice President – Technical, Industrial Hydraulics and Albert Köckemann, Development Manager, Industrial Electronics, Bosch Rexroth, Lohr am Main, Germany

Image courtesy of Bosch Rexroth
Electrohydraulic drives are primarily used whenever a high power/weight ratio, compact size and/or large forces are required for individual applications. These drives are often used together with electric drive technology in machines. However, in terms of automation, unlike electric drives, today’s electrohydraulic drives are still largely connected via analog interfaces and centralized closed control loops.
To compensate for the inherent differences of hydraulic drive technology and, at the same time, significantly enhance its performance and diagnostics capability, Bosch Rexroth has developed a consistent automation platform that can be configured for both centralized and decentralized systems.
This article first gives an overview over what’s already available and how it relates to the automation world. Second, we’ll delve into decentralized drives in greater detail, explain their benefits, and present some notable applications.
Technical landscape
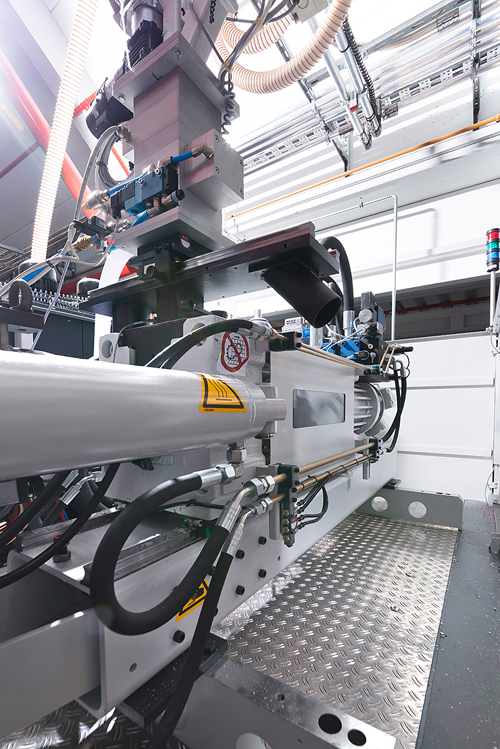
The latest hydraulic systems and controls make plastics processing more precise, economical and safe.
Current developments and target goals can be characterized by the following starting points:
- Valves and pumps: Today, the majority of valves and control pumps are controlled via analog interfaces (±10 V, 4 to
20 mA). For the modern automation level, suitable digital interfaces are a must. - Axis control loops: Control loops are mainly managed centrally in higher-level automation systems. In the future, control algorithms tailored specifically to hydraulic requirements and with an adequate computing capacity will have to be available.
- Real-time-capable bus systems: In the field of automation technology, Ethernet-based bus systems are on the rise. The prevalence of a variety of control manufacturers in individual markets and regions results, unfortunately, in a very heterogeneous situation regarding the bus systems that machine builders and users must support. Our systems can handle multiple communication (multi-Ethernet) protocols.
To fully integrate “classic” electrohydraulic drives and also take into account new “hybrid” systems, such as the servo-pump and self-contained axis, the target situation defines the newly developed, consistent automation system:
- Electrohydraulic valves and servopumps can be controlled directly via the bus system.
- With regard to valves, a distinction must be made between an Integrated Field Bus (IFB) function and an Integrated Axis
Control (IAC) function. In the IFB, an Ethernet-based bus system replaces analog interfaces. The integrated bus capability allows additional data to be exchanged with the higher-level control for configuring the valve or for transmitting internal state variables. Open and closed-loop control tasks for the drive remain within the higher-level control (centralized structure).
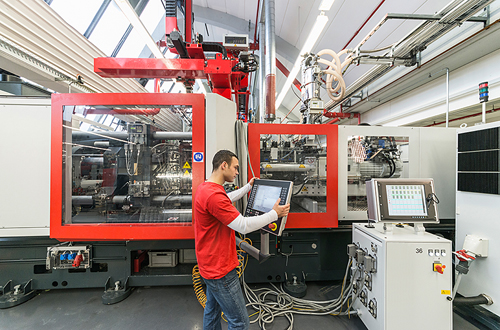
Integrated axis control is commonly used in injection-molding machines for motion and force control.
In the IAC, axis control loops (position, velocity, pressure and/or force control) operate in a decentralized arrangement. The higher-level control merely provides command values and status signals in real time.
- The “servo-pump“ system (Rexroth’s Sytronix product) uses the same automation connections as in electric drive technology.
- The same is valid for the hybrid drive, which consists of an electric servodrive with hydrostatic transmission (the so-called “self-contained axis”). Axis-control functions in this hydraulic subsystem are implemented as part of the converter firmware.
Demands on the target system
In developing future-looking Industry 4.0 type systems, requirements can be subdivided into the following three areas:
Functional (essential) requirements:
-
Ethernet-based bus systems let individual drives communicate with higher-level controls.
Implement all relevant Ethernet-based bus systems. Open interfaces mean customers can use virtually all automation systems common on the market.
- Tailor axis controller algorithms to suit the special requirements of electrohydraulic drives.
- Valve and pump connections embrace integrated safety concepts, where devices receive bus communications on one hand and implement the required safety standard on the other. Examples include press safety and the demands made on the closing axis of plastics machines.
- Bus communication is not only used for transmitting command and feedback values, but also for capturing additional information from components and drives in terms of data, so the control introduces a “Condition Monitoring Ready“ capability.
- Built-in tools such as software oscilloscope functions, essential for commissioning, are available.
Desirable requirements and approaches:
- One consistent programming and commissioning tool for all drive forms (electric and hydraulic drives)
- Identical bus connections for all drive forms (state machines)
- Identical parameter designations and scaling of machine data for all types of drives
- Software-supported tools like “wizards” and automatic-optimization algorithms simplify commissioning (in particular of hybrid drives).
Thanks to PC-supported programming and Bosch Rexroth’s IndraWorks (IW) parameterization tool, which can be used equally for electric and hydraulic drives, engineers can consistently meet these requirements. Consequently, electric and hydraulic drive technologies are treated identically. Dialogs in IW tailored specifically to the individual devices take into account special characteristics of drives and simplify commissioning.
Commercial requirements:
- User acceptance requires a portfolio of components and drives which are widely scalable with regard to performance and functionality, because customers only pay for what is actually required for the application at hand.
- The extra cost resulting from the digitization of valve and pump electronics must be justified in actual applications through the added value offered by direct bus integration, reduced commissioning expenditure, lower cabling effort and important additional capabilities such as decentralized control and condition monitoring.
Decentralized drive systems
To provide additional details, here’s a closer look at the components and subsystems in IAC drives. The components available for this can be classified into the following subsystems:
- Valves: Direct and pilot-operated proportional and high-response valves of the 4WRPE family are currently available in sizes 6, 10, 16, 25, 27, and 35.
- Pumps: Servo-controlled pumps in Model Series A10 and A4 in sizes 28, 45, 71, 100, 140, 180, 250 and 355 are available today.
- Digital integrated electronics (termed On-Board Electronics or OBE) for these valves and pumps are used in IFB and IAC variants, as described in more detail below.
In terms of hardware, robust IP65 electronics is available in the IFB and IAC. Both are equipped with interfaces for up to four pressure sensors (either current or voltage signal range). In the IAC, interfaces for position measuring systems (SSI) and incremental interfaces (1 Vpp) are also available. For communications, an integrated multi-Ethernet interface permits connection to one of the following bus systems:
Sercos, EtherCAT, POWERLINK, VARAN, PROFINET or EtherNet/IP.
In other words, every component “speaks” six languages. Hardware variations due to different bus systems can thus be avoided. This is also interesting for users needing to run different central controls because of their customers’ demands. The selected bus system is activated via the software.
Safety is also an important consideration. Capabilities such as “Safe Halt,“ “Safe Direction“ and “Central Position Monitoring“ run independently of the bus system via two certified digital inputs and two associated digital output signals. With regard to the valves, they provide safe shutdown of the output stages for the solenoid. This approach permits safety functions without having to design the entire bus system, master included, as a safe system.
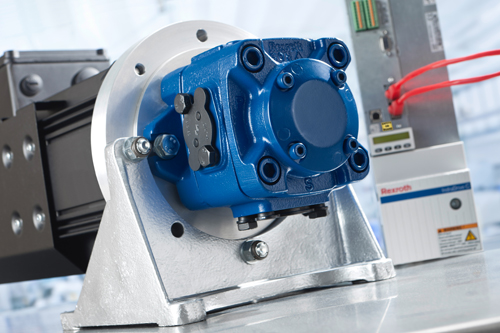
The Rexroth Sytronix SVP 7010 is a variable-speed pump drive that offers high accuracy and dynamic performance with low energy consumption.
Software functions of the OBE for valve-controlled drives (comparable functions are available for control pumps) include various bus systems, as described above. Other considerations are:
- Valve controller: While the dynamic behavior of the valve can only be modified by the manufacturer, the user can adjust the valve characteristic (curve).
- Closed-loop flow control: By means of up to four integrated pressure sensors built in a sandwich plate directly below the valve, an electronic “pressure compensator function” (load-independent flow) can be implemented. This is particularly useful for applications where the use of a position-measuring system is out of the question due to cost or technical reasons (for example, in the core-pull function in plastics machinery).
- Closed-loop pressure control: Apart from pure press control functions (pressure and differential pressure), alternating control and force-limitation modes can be activated.
- Position controller: All of the algorithms required for hydraulic drive technology are stored in the controller. This also includes processes for state feedback and continuous path control.
Other considerations include diagnostics and commissioning aids. Apart from analysis tools such as a software oscilloscope and error log, the system provides wizards for the pre-calculation of control parameters, as well as automatic optimization tools for axis controllers in continuous path-control modes. Future software versions will offer condition-monitoring functions.
However, the set-up already monitors valve functions. In addition, the IAC also offers axis monitoring functions (such as maximum velocities, forces and dynamic following errors).
Finally, the system has an integrated PLC. It lets the customer program functions such as adjusting the controller to suit individual applications, special motion profiles or application-specific reactions to errors. Here, the customer can flexibly integrate its know-how and protect it accordingly.
Application examples
This drive structure suggests itself particularly for applications in which:
- Various machine axes can operate independently of one another, or
- How the motion of one axis depends on that of another only has to be accounted for when generating command values (such as, for example, with interpolating axes).

Stand-alone hybrid linear axes combine an electrical drive and hydraulic cylinder. They reduce installation space and engineering time and are IoT compatible.
A further criterion using IAC can be when controlling a large number of axes. The decentralized control approach relieves the central control of most tasks and, in addition, cabling efforts can be drastically reduced.
For example, IAC is commonly used in injection-molding machines for motion and force control. Optimized digital closed-loop control of the injection process ensures tight precision, say over pressure, speed and force when closing and clamping the mold. That’s because the transition from velocity to pressure control of clamping—with high accuracy—is essential to maintaining dimensional stability of the injected part as well as the mechanical integrity of the machine. It also reduces cycle times while improving the machine’s energy efficiency.
Differential force control permits the application of only the required forces, helping protect the mold without compromising speed. And as noted previously, hydraulic drives with on-board electronics can improve safety on machines such as these. One obvious reason is to protect workers during clamping actions. But also, if a part does not cleanly release and remains in the mold, the electrohydraulic control system senses a malfunction, stops movement and prevents damage to the machine.
Another application example involves automating axes in a sawmill. In this case, the need for a large number of self-contained axes and sizeable physical distances between them were decisive for choosing a decentralized drive structure. EtherNet/IP was used as the bus system to communicate as needed with higher-level controls. The system, which has run in a three-shift operation for more than a year under harsh operating conditions, shows the robustness and reliability of the electrohydraulic system.
Finally, consider a highly complex rotary-indexing machine. The demands on the drive axes and the entire automation system are extremely exacting with up to 48 interpolating electrohydraulic axes plus electric servodrives. Requirements for continuous path and positioning accuracies are on the order of a few microns.

The Sytronix DFE supplies pressure and flow on demand. A variable-speed electric drive controls an electrohydraulically driven axial-piston pump.
The CNC technology used for the axes must handle up to 28 NC channels. Here, the IACs operate in conjunction with an MTX control and a Sercos bus system. The result is a 20% increase in productivity compared with previous versions of the machine. At the same time, lower cabling and commissioning costs as well as optimized CNC performance reduced overall system costs. The machines work trouble-free around the clock.
The efficiency of electrohydraulic drives and not least their full and “easy” ability to integrate into automation systems are, apart from the cost, essential competitive criteria that speak in favor of this drive technology. The concepts presented here are characterized by consistency in terms of automation. The key aspects are:
- The integration of open bus interfaces into the hydraulic components
- The integration of hydraulic “know- how” into the drive firmware
- Identical behavior to that of electric servodrives when it comes to automation
- One consistent commissioning and diagnostic tool for all drive types, including valve-controlled, pump- controlled and hybrid systems consisting of an electric servodrive with a downstream hydrostatic transmission.
Whether central or decentralized axis control is the better choice depends on the specific application. Regardless, such concepts make hydraulic drive technology “Industry 4.0” ready, while maintaining its competitiveness as physically compact, robust and capable of high speeds and large forces.
Bosch Rexroth
boschrexroth.com
Filed Under: Fluid Power World Magazine Articles, Slider