
Vacuum gripper technologies provide many advantages for machine and OEM payload handling. Designers find that modular gripper system kits are a versatile and rapid way to create handling solutions, with other benefits such as internal vacuum routing.
By Pat Phillips, AutomationDirect
Manufacturing equipment, pick-and-place systems, robotics, and other machinery typically need to reliably grip products, materials, containers, or other objects so they can perform their functions. For robotic arm applications, this payload-handling hardware is often called end-of-arm tooling, but other equipment may simply use the term gripper. Many grippers use pneumatic- and vacuum-operated components to create the necessary forces and motions.
OEMs and machine designers invest a lot of effort to ensure these gripping interfaces perform reliably and are easy to maintain. Dropping a payload can lead to significant waste, and hardware failures introduce costly downtime. Custom-engineered gripping systems can theoretically be developed to meet any need, but the cost may be unacceptable, and the risk of design rework is high. In addition, many applications need the flexibility to handle many different types of payloads or address changing requirements.
For these and other reasons, a new concept of modular gripping systems provides OEMs and designers with better options. By starting with a modular system, designers can rapidly build a solution based on a proven combination of components and easily add other components initially or in the future as needed.
Advantages of pressure and vacuum
Compressed air and vacuum systems are complementary ways to engage a variety of gripping techniques. Air pressure can easily transport energy to any end-of-arm tool or machine location using various sizes of flexible hoses and fixed tubing or manifolds.
Pneumatic and vacuum systems can generate significant force, yet the air pressure can be regulated to adjust this force for more delicate operations. These systems are more economical and easier to work with than electrical or hydraulic equipment. Also, air pressure can create vacuum as needed using a vacuum generator, also known as a vacuum ejector. In many applications, it is only necessary to route one appropriately sized compressed air supply hose out to the gripper hardware. Then, manifolds and solenoids can operate devices, simplifying installation and maintenance.
Compressed air can be used directly to operate mechanical grippers or linear or rotary pneumatic actuators associated with other gripping mechanisms. This is suitable and even preferred for many types of payloads but requires accurate positioning, and it can sometimes run the risk of marring the payload or dropping slippery or smooth objects.
Therefore, many designers rely on vacuum suction cups for gripping. Suction provides a strong grip with little chance of damaging the payload. It is particularly useful to grip flat areas of cartons, cardboard, and injection-molded parts, and multiple suction cups can be arranged on a tool to grip available payload surfaces, providing a degree of redundancy.

Suction cups are available in various sizes, configurations, and materials, each of which can be selected based on the payload. Suction cups may be flat, but bellowed styles also provide a degree of cushion and variability for the gripping action. Some typical materials are Elastodur, nitrile rubber, and silicone, which are selected based on elasticity, durability, and payload texture.
Arranged on a gripping tool, suction cups can be fixed-mounted or installed on a spring plunger to provide additional flexibility for payload height variations. In some cases, one or more position sensors may be installed on the tool so that the automation system can detect when the suction cup is in gripping range of the payload.
While these pressure and vacuum details are fairly straightforward, creating a framework or tool to support these grippers in the proper geometry is necessary, which can require significant design expertise.
Designing a support system
Gripping tool frameworks need to be strong enough to support the payloads and rigid enough to prevent flexing, which could cause grip failures or wear, yet light enough to avoid burdening the machine mechanism or robot supporting them. They also require a compact overall size envelope to prevent interference of the tool with the machine or payload sources and destinations.
Some designers might work with a fabrication group to create the framework from metal stock by cutting, welding, and fastening pieces, but this custom work limits the ability to easily make changes moving forward. Another popular approach for many teams is using T-slot aluminum framing systems, which offer many configurations of material and fittings and are comparatively easy to assemble and modify.
A better hybrid solution has emerged for creating pneumatic and vacuum gripping tools that combine the benefits of standard framing systems with the convenience of standardized modular kits while adding benefits specific to vacuum distribution.

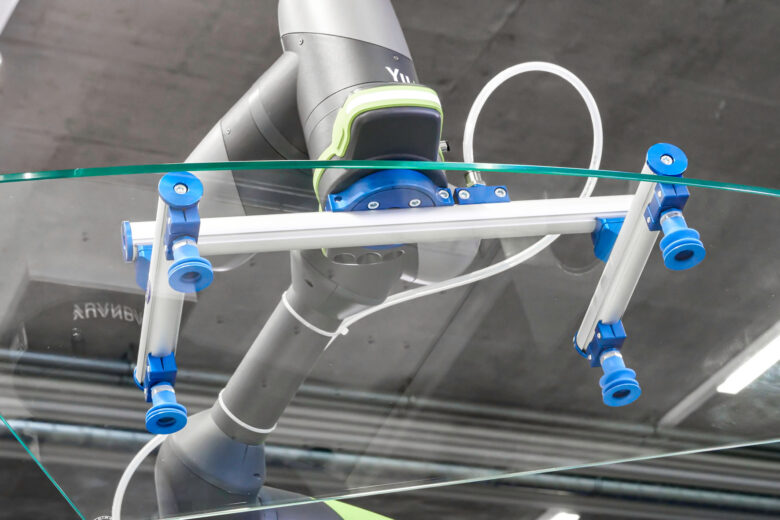
Modular gripper system kits consist of starter sets in popular configurations. They comprise dozens of parts, including aluminum structural profiles, joints, holders, and connections. Rated for small- to medium-sized applications up to about 140 active pound-force load, they are also available with flange adapters to connect the tool to commonly used robots. Designers select the kit that gives them the greatest head start, then add other components to complete the assembly by cutting, drilling, and attaching components with fasteners.
One important innovation of this modular system is that vacuum can be distributed internally through the framing profiles in addition to or in place of the traditional way of using external tubes, pipes, and hoses. This is because the framing profiles are hollow inside, and various sealing end caps and other connectors/adaptors are available to connect the vacuum supply and the vacuum cups to the framing.
The result is that users can create an exceptionally compact gripping tool, useful for applications with confined spaces, and can avoid problems with tubing getting snagged in operation. Because the system can be streamlined by internal vacuum distribution, it is easy to keep clean and maintained. Vacuum distribution throughout the frame also makes adding or changing cup configurations in the future easy.
Standardization accelerates reliable gripper design
To avoid the costly and risky pitfalls of “reinventing the wheel,” engineers and designers usually prefer to build solutions based on standardized offerings to the greatest extent possible. For OEMs and machine designers, there is a great need to develop pneumatic- and vacuum-operated gripper tools for many equipment and robotics applications.
By beginning their designs with modern modular gripping system kits, end users can create versatile gripping tool configurations more economically and rapidly than with a completely custom approach. In addition, they can benefit from technologies such as internal vacuum routing while preserving the ability to modify the tooling in the future.
AutomationDirect
automationdirect.com
Filed Under: Components Oil Coolers, End Effectors & Grippers, Pneumatic Tips, Vacuum