
The Soft Robotics Toolkit group has announced the winners of the 2018 Soft Robotic Design Competition and the coveted Prize for Research. The annual competition draws hundreds of participants, including researchers, university and high school students, and hobbyists. Participants document the design, fabrication and testing of their submitted soft robotic technology and publish the results online.
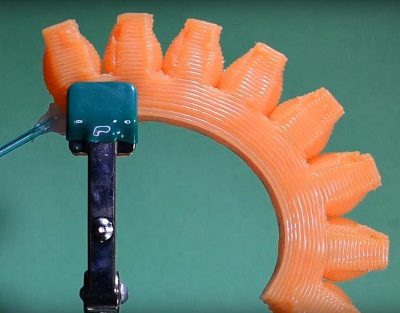
The mLab Robotics team at Oregon State Univ. developed the 3D Silicone Printer. It successfully 3D prints two-part silicones for soft components like this pneu-net actuator.
The Soft Robotics Toolkit organization provides comprehensive resources to help students and researchers learn how to design, fabricate, model, and test soft robotic devices. It grew out of R&D work at Harvard University and Trinity College Dublin which focused on developing better instructional kits for hands-on design courses. Here’s an overview of this year’s notable projects.
3D silicone printer. The prize for Contributions in Soft Robotics Research was awarded for the 3D Silicone Printer, developed by the mLab Robotics team at Oregon State Univ. The 3D Silicone Printer reportedly adapts additive manufacturing to the soft robotics world. The group developed a micro-scale active mixing system, allowing practical 3D prints of two-part silicones.
Successful 3D printing eliminates the need for laborious and time-consuming molding methods like lamination casting, retractable pin casting, lost wax casting, and rotomolding. Such conventional processes restrict possible geometrical shapes, complexity and scale of soft components, and cause fabrication variability that limits repeatability.
But current 3D printers generally rely on harder materials and are not able to 3D print parts with internal structures as soft as their molded counterparts. To use viscoelastic materials and overcome strain limitations, researchers focused on direct ink writing (DIW) techniques. The team developed an extrusion system that combines aspects of prior research: an active mixer and controlled heat treatment.
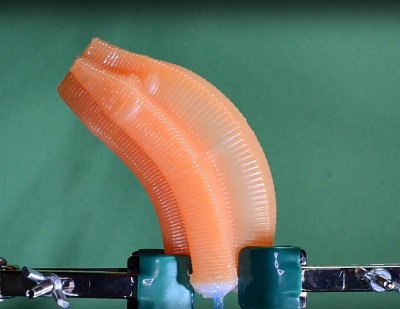
Oregon State’s mLab Robotics group printed this soft-robot four-channel tentacle.
The 3D printer, with an enhanced extruder mechanism, can fabricate soft functional robots with a two-part platinum cure silicone material. The layer-by-layer 3D DIW technique, in contrast to soft lithography and lost wax casting, requires no human intervention, introduces fewer dimensional errors, and reduces the fabrication time by more than 50%. The resulting 3D printed soft robots reportedly match or exceed the performance of their molded counterparts while being stronger and more reliable.
Laminar jamming. Runner up in the research category was Laminar Jamming Structures by the Harvard Biorobotics Lab, Harvard University. These structures can alternate between highly flexible and extremely rigid states when a pressure gradient is applied. Thus, soft robotic components with laminar jamming can selectively exhibit the mechanical properties of traditional rigid robots.
Laminar Jamming Structures (LJS) are composed of stacked layers of thin, flexible sheets enclosed in an airtight bag, which lets the components conform to complex shapes – such as for wearables in biomedical applications. The choice of material and number of layers in these structures also can be used to tune the desired stiffness and damping ability for specific applications.
Applying a vacuum to the airtight envelope actuates the unit. Increased frictional interaction causes coupling between the layers and dramatically increases the bending stiffness of the structure, which behaves like a unified beam. In addition, at high loads, shear stress causes layers to slip, which results in dissipation of energy through dry friction. In short, when vacuum is applied, the structures can transition from a very compliant state to a more rigid or shock-absorbent one.
The structures can be designed to pinch, wrap or grasp, depending on the vacuum pressure applied, or remain flexible when vacuum is off. Coupled with a soft actuator, they can lock in arbitrary shapes after being jammed. Laminar jamming can also effectively tune the dynamic responses of real-world robotic structures and systems. And the impact response of soft structures can be tuned to conserve or dissipate energy as desired.

A design by students at the Franklin W. Olin College of Engineering explored whole-skin locomotion of an elongated fluid-filled torus.
Whole skin locomotion. The winners in the college category were students at the Franklin W. Olin College of Engineering, for Shape Memory Alloy Driven Whole Skin Locomotion. The design explored the feasibility of using whole-skin locomotion to facilitate continuous movement of an elongated fluid-filled torus. It used shape memory alloy as contracting rings that enables the prototype torus to inch forward.
According to the team, flexible locomotive robots are one of the most exciting areas of soft robotics. WSL is inspired by the movement of an amoeba, whose locomotion heavily depends on cytoplasmic streaming. In WSL, an inverting torus can mimic the effects of cytoplasmic streaming: As the torus inverts, the entire exterior facing membrane moves in the same direction and returns though the center. With their compliant nature, these robots could be suited for traversing the constrictive and unpredictable terrain commonly found during search-and-rescue situations.
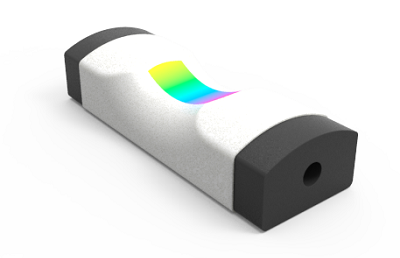
The ConTact Sensor from Univ. of Washington’s Rombolabs is a force and contact-area sensor that can be easily integrated into most soft-robotics designs
ConTact Sensor. Students at Univ. of Washington’s Rombolabs received one Honorable Mention award. The project, the ConTact Sensor, is a force and contact-area sensitive sensor that can be easily integrated into most soft-robotics designs. Using the fluidic conductive medium inherent in soft robots, the sensor can sense the force and size of an object pressing into it.
Soft robots often rely on fluids (air or liquid) for actuation by modulating pressure. Similarly, soft sensors rely on the same properties for measurement. However, in most applications the fluid properties themselves — such as electrical resistance or temperature — are seldom exploited for sensing. The team presented the idea of using the fluid medium as a sensor to gain richer overall sensing capabilities, determining not only the amount of force an object is applying to a soft sensor, but the size and shape of the object, too.
The main sensing element is a conductive fluid core with conductive rubber leads. It uses conductive salt water fluid to measure both resistance and pressure change, and sense both the bulk deformation and change in cross sectional area, from which they estimate the size or shape of the object the soft sensor is touching.
Soft bending actuator. The other Honorable Mention was for Soft Bending Actuation Module with Proprioceptive Curvature Sensing, from students at Worcester Polytechnic Institute. Human proprioceptive sensory receptors, found in muscles, joints and the inner ear, detect motion or position of the body or a limb by responding to internal stimuli. This design introduces such magnetic curvature sensors for embedding inside soft actuation modules.

Students at Worcester Polytechnic Institute designed the Soft Bending Actuation Module with Proprioceptive Curvature Sensing.
The soft bidirectional bending actuator consists of two chambers each wrapped in a double-helix of thread mounted on either side of an inextensible constraint layer. Each chamber connects to an external air supply and, when pressurized, causes the segment to curve in the opposite direction. The central constraint layer holds a flexible curvature sensor which measures the kinematic state of the actuator.
The sensor contains a miniature magnet and a Hall-effect measurement integrated circuit. The magnet is precisely positioned with respect to the Hall element on a flexible circuit, to measure the curvature of bidirectional out-of-plane deformations in a standalone package without the need for external electronics.
As a practical example, WPI’s third-generation soft robotics snake (which includes on-board electrical and fluidic power, embedded control, and distributed solenoid valves for tetherless operation) incorporates custom magnetic curvature sensors within each soft bending actuation segment, for real-time proprioceptive measurements.
Soft Robotics Toolkit
softroboticstoolkit.com
Filed Under: Pneumatic Tips