
In our recent hydraulics design series, we’ve looked at how to improve and enhance circuits and systems with an eye toward reducing complexity, lowering costs and improving overall efficiency. Here are a few comments on the effects of some specific types of components discussed, as well as options engineers need to consider in terms of overall system performance.
A primary focus throughout the series (listed below) is on actuators like hydraulic motors. Take, for example, the circuit discussed in “How to improve hydraulic motor drives” that delved into the nuances of hydraulic motor two-speed drives. The concept circuit, shown below, would work equally well for a double-rod cylinder or single-vane rotary actuator as long as flows are symmetric.
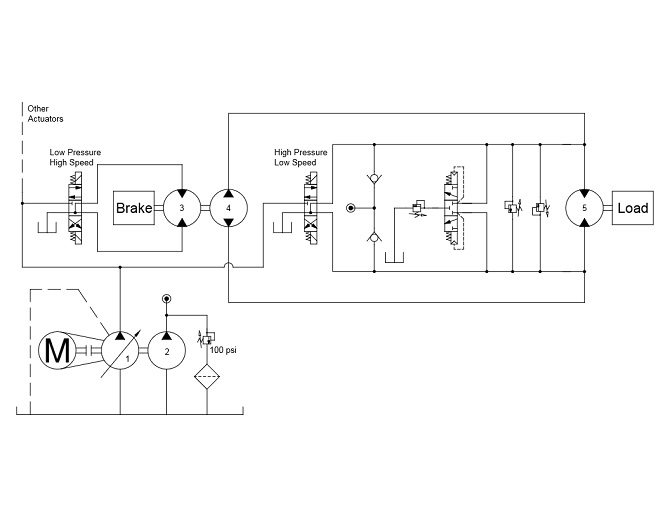
Alternative circuit for two-speed actuators
At first glance, the two-speed motor circuit appears to be extremely inefficient. During high-speed, low pressure operation, energy will be lost through the 4-way LP/HS valve and motors 3 and 4, even though each of these devices would be operating near optimal design efficiency.
For instance, assume Unit 3 is a bent-axis piston motor with around 94% overall efficiency; Unit 4 is a large low-pressure gear or vane-type unit that offers efficiency of approximately 85% under ideal conditions; and the 4-way LP/HS valve is a typical D05 size that operates at a fraction of Unit 4’s flow with throttling losses of approximately 3%.
Combining these losses gives a transmission efficiency of 0.94 × 0.85 × 0.97 = 0.77. Accounting for internal leakages and torque losses, perhaps a final result would be closer to 75% efficiency, and this does not include losses from Unit 1, Unit 5 and various plumbing lines and connections.
A more-traditional circuit might have 4-way valve losses of 8 to 10%, which is better than the 25% loss through the two-speed design. But it would have a typical axial-piston pump that operates near 75% efficiency at low pressure. More importantly, without the two-speed drive circuit, Unit 1 would be oversized for the working cycles of all other actuators, which results in further efficiency loss.
As another option, engineers can consider a completely different approach to better efficiency: all of the hydraulic motors discussed throughout the article series could be replaced with electric motors and VFDs. This would allow rotation reversal of the low-pressure, high-volume (LPHV) pumps. Depending on motor/VFD size, this may have a similar overall cost to the hydraulic motor design.
A single VFD can run multiple electric motors, as long as they can be operated sequentially and not simultaneously. This means the VFD can bring Unit 1 (the primary pump) to a stop, then accelerate the LPHV pumps by switching to control a separate electric motor. Efficiency would be much improved in this case. During LPHV operation, there would no losses from Unit 1, no valve losses, and no hydraulic motor losses.
The obvious downside is response time. Standard induction motors may require several seconds to reach full speed. However low-inertia motors can fully reverse rotation in under 200 msec, even for motor sizes greater than 100 hp. A related downside is deceleration time. Near the end of stroke (either extend or retract), the LPHV pumps must stop rotating. Load braking of the electric motor will occur due to rapid pressure rise. At this point, the VFD must be commanded to switch control to the motor of Unit 1.
To read previous stories in this hydraulic-design series, see:
Design concepts for open-circuit architectures
Flow amplification limits valve losses
Regenerative concepts for flow amplification
What are opposite-phased cylinders?
How to improve hydraulic motor drives
Filed Under: News, Pumps & Motors