
Hydraulic motors are rotary actuators that convert hydraulic energy into mechanical torque. Using the pressure and flow provided by the hydraulic pump, hydraulic motors rotate to pull, drive or winch external loads on various hydraulic machines spanning construction equipment to food mixers.
The three most common constructions of hydraulic motors are the gear, vane and piston varieties, each with a unique style. In addition, some common types use orbital technology, such as gerotor and geroller motors.
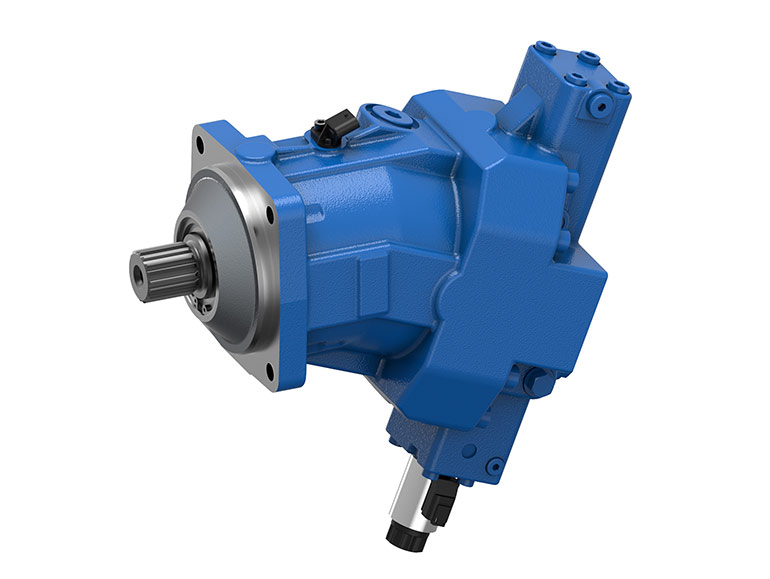
A36VM axial piston variable motor, which was developed specifically for hydrostatic drivetrains. It allows greater tractive force and speed for mobile machines. Image courtesy of Bosch Rexroth.
Manufacturers offer fixed-displacement pumps in all the major construction types, with only the piston variety available with the variable-displacement option. A fixed displacement means the theoretical motor volume remains constant, while torque and speed vary only by adjusting flow and pressure through various means. A variable-displacement motor modifies displacement through swashplate control, essentially offering infinite adjustment of speed and torque within its range of control.
Understand motor torque and speed
Torque, or the turning and twisting effort of the force of the motor, is expressed as inch-pounds (in.-lb), foot-pounds (ft-lbs) or newton meters (Nm). When describing the torque performance of a hydraulic motor, we describe three different areas. First, breakaway torque is typically used to define the minimum torque required to start a motor with no load, and this torque factors in internal friction and the pressure required to overcome static friction.
Running torque describes the load-induced torque a motor uses to move whatever rotary function the machine requires. Running torque may be relatively stable, such as a winch function, but could also vary widely for dynamically changing conditions, such as wheel drive motors.
Starting torque is the minimum torque required to start a motor under load and is a combination of load-induced torque (which factors inertia) and breakaway torque. The ratio of actual torque to theoretical torque provides us with the mechanical efficiency factor of a hydraulic motor.
We calculate the hydraulic motor’s internal volume to describe how much fluid the motor circulates in one single rotation, otherwise known as displacement. Displacement is a volume calculation, so units are expressed in cubic centimeters or cubic inches. The larger the motor’s displacement, the higher the force created per pound per square inch of hydraulic pressure, but the motor’s velocity is inversely proportional to displacement.
Motors are often described with theoretical numbers because the geometry that makes up the motor’s physical displacement is offset by clearances and leakage that prevent actual torque from matching theoretical torque. So if you wish to achieve a desired output speed (usually described in revolutions per minute or rpm), you must also factor in efficiency. For example, any given piston motor may achieve 90% efficiency, so that provided with 100 gpm, the motor will waste 10 gpm as pure heat rather than motion.
You can calculate motor speed by the following formula, where 231 is just the number of cubic inches in a gallon:
Flow in gpm x 231 ÷ cubic inch displacement = rpm
Motor type and selection
Each motor type enjoys different natural characteristics and expect performance to be relative to cost. Gear motors, for example, are inexpensive but generally limited to medium pressure, medium torque and a narrow range of displacement (although they generally offer the lowest displacement options), and they are often rated for high speed (3,000 rpm or more). On the other hand, vane motors offer the fluid power designer a medium-pressure, medium-speed, quieter, and more efficient option than the gear motor option.
The piston motor provides a wide range of capabilities, although counting on few being considered an economical capital purchase, their efficient nature quickly provides a long-term return on investment. As small as 5 cc or as large as 1,000 cc or bigger, the piston motor also offers a vast array of control options. You can also expect high pressure, high torque, high-speed options — as well as being the most efficient choice.
The construction of each motor, as you’d expect, varies widely by style. Gear motors feature two gears, one driven (by the shaft) and the other idle. Their function is simple; high-pressure oil enters the inlet port, which flows around the gears and housing to the outlet port. Although torque is a function of displacement and pressure, providing high pressure at the inlet does not guarantee high force. The pressure differential from the inlet and outlet port matters, so understand that every psi of backpressure reduces effectual output.
At the medium-pressure and cost range, vane motors feature a housing with an eccentric bore. The motor’s vanes slide in and out of its rotor, and displacement is controlled by the size of the vanes and the width of its eccentric bore. The movement of the pressurized fluid causes an unbalanced force, which in turn forces the rotor to turn in one direction.

Thorx family of cam lobe motors reduces shock at speed changeover by 70%, improving machine handling and operator comfort. Image courtesy of Danfoss
Piston-type motors are available in various styles, including radial, axial, and bent-axis styles, to name the most popular. Radial-piston motors feature pistons arranged perpendicularly to the crankshaft’s axis. As the crankshaft rotates, the pistons reciprocate radially by the fluid pressure. Axial-piston designs feature several pistons (the most common is nine) arranged and reciprocating axially inside a housing (cylinder block, rotor, or barrel). The pistons ride on a wear plate which is either fixed or adjustable, and the thrust plate’s angle partially dictates the pump’s displacement.
This cylinder block rotates about its axis by a shaft aligned with the pumping pistons. Two designs of axial piston motors exist — swashplate and bent axis types. Swashplate designs feature the pistons and drive shaft in a parallel arrangement. In the bent-axis version, the pistons are arranged at an angle to the main drive shaft. Another advantage to the piston pump is the control options. Electro-proportional control, two-speed control and even automatic displacement control varies torque and speed based on demand.
The orbital motors use a special spool or disc valve to automatically distribute pressurized flow to the fluid volume inside a uniquely shaped rotor arrangement. The gerotor design has a simple inside and outer rotor. In contrast, the geroller design employs rollers to offer lower friction, higher mechanical efficiency, and higher start-up torque than gerotor designs. In addition, they provide smooth, low-speed operation and offer longer life with less wear on the rollers. Gerotors provide continuous fluid-tight sealing throughout their smooth operation, although their efficiency is relatively low.
There are several essential things to consider when selecting a hydraulic motor. First, you must know the maximum operating pressure, speed, and torque the motor will need to accommodate. This will allow you to calculate its displacement and flow requirements to specify the pump flow and pressure required to operate it.
Hydraulic motors can use different fluids, so you must know the system’s requirements. Does it need a bio-based, environmentally-friendly fluid or fire-resistant one, for example, which may require special seals or technology? In addition, contamination can be a problem, so knowing its resistance levels is essential so you may choose appropriate filtration.
Cost is a huge factor in any component selection, but the initial cost and expected life are just one part of the equation. You must also know the motor’s efficiency rating, as this will determine whether it runs cost-effectively. In addition, a component that is easy to repair and maintain or quickly changed out with other brands will reduce overall system costs. Finally, consider the motor’s size and weight, as this will impact the size and weight of the system or machine with which it is being used.
Filed Under: Components Oil Coolers, Engineering Basics, Pumps & Motors