
The third annual Soft Robotics Design and Research Competitions rated projects that exhibited novel and innovative approaches to soft robotics components and research. Winners of the contest have just been announced.
The competition is sponsored by the Soft Robotics Toolkit, a team that grew out of research at Harvard University and Trinity College Dublin that focused on developing hands-on design courses covering soft actuator design, fabrication and control. It has evolved into a resource for supporting advanced technology development and cutting-edge robotics research for engineers, academics and students alike.
According to the sponsors, this year’s entries were particularly competitive, with participants from over 90 teams vying for a prize in one of three categories: soft-robotics research, and college-level and high school design.
Research winner
The first category required a significant contribution to research in the field of soft robotics through published work. The winning project was Foam-Based Soft Actuators, by the Organic Robotics Lab at Cornell University.
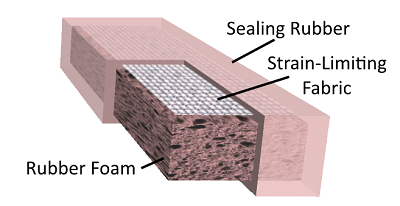
Foam-based actuators, Cornell Organic Robotics Lab
Foam-based soft actuators use open-celled elastomer foam sealed with non-porous elastomer, letting them take on novel shapes and configurations. The fabrication process to create the porous elastomer foams involves lost-salt casting, which creates pneumatic channels in the elastomer for inflation.
The main advantage is these actuators can easily be cast, cut, and even sculpted into three-dimensional shapes, permitting simple fabrication of 3D soft machines, said the researchers. Open channels and chambers for inflation are a requirement for fluidic actuators. Using other fluidic-actuator fabrication methods often requires either difficult molding methods (such as lost-wax casting) or complex assemblies of small actuators to form these channels. With foam actuators, the fluidic channels are already present in the form of an interconnected pore network.
College accolades
The student design teams were required to use some of the material on the Toolkit site as inspiration to build new and creative devices. A team from the MIT SAMs Lab and Korea University took the prize, with the 3D Printing Assisted Fabrication of Soft Robotic Hand with Embedded Soft Electronic Circuits.
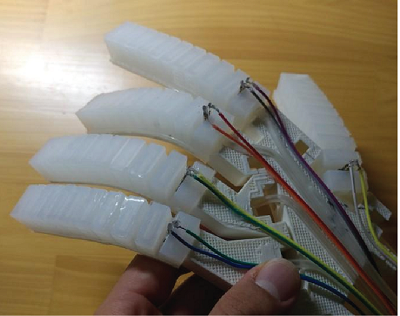
3D-printed embedded soft circuits, MIT SAMs Lab
The team used 3D printing to create a soft circuit embedded into an elastomer. What’s unique is this hand co-molds a circuit for an LED array, as well as the pneumatic channels for control of the hand’s movement. The hand is a proof-of-concept for other soft circuits to be embedded into other soft robots in the future
According to the group, despite recent advancements in soft actuators and robots, integrating electronic functions into soft robotic systems remains a challenge. In particular, combining conventional, rigid electronic components such as copper wires with soft robotic parts poses numerous problems in terms of structural integrity and stability. This is because the mechanical-property mismatch between the rigid electronic components and soft body generates points of stress concentration at the interfaces that typically become initiation points for failure during operation.
Among possible solutions, developing soft conductors with comparable mechanical properties to the soft robotic body seems to be a promising. However, although several types of inherently stretchable conductors have been developed for various sensors and electronic applications, functional incorporation of such materials into soft robotic systems tends to be difficult.
This project presented a two-step fabrication process that comprises 3D printing of soft electronic circuitry on a soft base, followed by assembly with a molded soft robotic body. The results demonstrated that the proposed approach can successfully fabricate a soft robotic hand with embedded soft electronic circuits, which can also light LEDs.
Edible actuators
The high-school winner was The Haveford School of Pennsylvania and its project, Food for Thought—Edible Actuators. This team created edible robots as a proof-of-concept for soft robots to be used in applications within the human body. Using traditional gummy candies and 3D-printed molds of actuators like Pneunets and soft grippers, this team successfully made pneumatically actuated gummy candies.

Edible soft actuators, The Haveford School
The goal was to build soft actuators out of melted gummies and, in the end, improve the often-mundane, elementary school science class by providing an early introduction into the world of soft robotics and pneumatic control. In addition, such gummy bear devices could aid in delivering vitamins, medicines and vaccines. The need for tasty gummy actuators might be used in oral surgery as a pleasant way of reaching in a child’s mouth, said the students. While the project focused on the educational and entertaining aspects of gummy and gelatin actuators, there could be a broader need for edible and good-tasting actuators.
Soft Robotics Toolkit
www.softroboticstoolkit.com
Filed Under: Pneumatic Tips